
After much dithering I decided to go with the 2510 screws and some powerful nema 34 steppers. I’ve not picked the motors and drivers yet but looking at what’s been recommended to me by others I can clearly get something that will work in a 34 package so it’s time to press on with the design.
Since I’m using 50mm box for the frame I can’t directly mount the screw bearing block onto the frame. I’m hoping to get around that by mounting the bearing block and motor on a plate (green in the image) which then bolts onto the frame. The picture below shows the business end of the screw but there’s a similar plate at the other end as well.
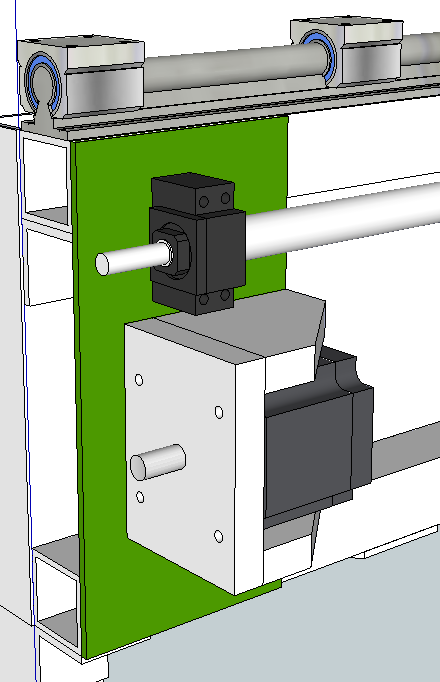
The plate is drawn here is 100x300x5mm as it was going to be steel but I’m now thinking aluminium would be better as it would be easier to work (I want to provide some vertical adjustment holes for example). I’m not sure 5mm aluminium be strong enough but it’s an easy redraw if I find out I need more.
The motor housing is drawn in 20mm aluminium which looks far thicker than I need but I have very little experience to go by. I’m thinking 16mm or even 12mm might be strong enough but I’ll be drilling and tapping the edges to join the pieces together so it can’t be too narrow. Ideally I’d like to use the same thickness plate for parts on the gantry and Z-axis so that I can just buy one large piece of plate which, fingers crossed, will be cheaper.
The last problem is what grade of aluminium to go for. The motor housing and probably a few other bits will need to be milled out; I’ve got decent variable speed router so I’m going to give it a go with that (taking very light cuts and with a template). I seem to remember someone saying they were using C250 but it looks like 6082 is easier to machine from what I’ve read.